Self-Driving Cars Part -I : An Introduction & Anatomy
Autonomous vehicle technology has been an emerging field in these years. Its Global market is expected to be 1.3 billion by 2030 with a CAGR of 63.1%



This Self-Driving Cars Series is going to be like GOT of autonomous cars where we are going to learn core things of these amazing vehicles. We will be dealing with Robotics, Artificial Intelligence, Internet of Things etc. also we will be using sensors like LIDER, RADAR, Ultrasonic and Cameras to sense the environment. Overall you will have an understanding of how they are built and how to pursue career in this field. So buckle up the seat belt and let's drive:
A few days back, I and my friend were talking about cars. He has a good amount of knowledge on cars. When we reached the self driving cars topic, he pointed out a good question: "Won't it be tasteless to drive a car where you have nothing to do?", This is something that nobody can disagree: People loves driving cars, which is indeed true.
So first thing first(We will define self driving cars soon), "Why do we need self-driving cars?"
Probability of human error is considerably higher than that of a machine error" -Kenneth Appel
1. Safer than ordinary cars in road: As Per Govt data, 94 percent of the road accidents are because of human errors. A self-driving cars will reduce the error level of human factor by being autonomous. Human presence is sometime very important in transport but in many areas we can use computer to achieve greater efficiency. Drugged driving, Over speeding, Distractions cause most of the accidents in road, replacing a human driver with a computer will reduce this errors.
2. Anyone can drive: Person with disabilities such as blind, hearing problem, can't move with feet or any other physical disabilities will be capable of driving such cars. Just give two inputs: "From"- "To".
3. Reduce Traffic Jam: People spend hours sitting in traffic congestion. This happens due to inappropriate lane changes, breaking of traffic rules, parking in improper places etc. Self-driving will take care of these things very gently and which will reduce traveling time.
There are so many benefits of having self-driving cars. I like them because of the first point and they reduce environmental pollution as they will be run on electricity.
"Self Driving cars are the natural extension of active safety and obviously something we should do" - Elon Musk
Self-driving cars or autonomous vehicles are those in which operation of vehicles occurs without direct inputs from the driver such as steering control, braking, acceleration etc. They are designed to sense the environment and make decisions to drive the car without observations of the people(even the diver) inside the vehicle.
What makes the driving task?
- Lateral Control eg. Steering
- Longitudinal Control eg. Accelerating or braking
- Object and event detection and response(OEDR) eg. Detection and reaction
Based of this there are 5 levels of automation of cars:
• Level 0: The human driver is in complete control of all functions of the car.
• Level 1: One function is automated.
Some functions are: Adaptive Cruise Control - Can control speed, driver has to steer.
Lane Keeping Assistance- Can help you stay in your lane, if you drift.
• Level 2: Two functions longitudinal and lateral are automated at the same time (e.g., steering and acceleration), but the driver must remain constantly attentive.
• Level 3: The driving functions are sufficiently automated that the driver can safely engage in other activities.
• Level 4: The car can drive itself without a human driver. Which can handle emergencies autonomous, no need of a driver.
We will know more about level 4 cars in this series. Waymo cars are example of this level.

Now let's define a two terms called "Perception" and "Localization": To inform the driving decisions we want things from the environment :
- Identifications of things - Different objects present in the environment nearby the vehicle.
- Motion of things.
Another term localization is nothing but knowing the position, orientation, velocity-acceleration of the object. It is important to know about these things in an autonomous vehicle because this is how AV figure outs where the hell it is in the world.
There are some goals for the perception: We have to know information about two kinds of objects here static objects such as road and lane markings, curbs, traffic signals etc. and dynamic objects such as vehicles, pedestrians etc. For the these purposes, we install some sensors to sense the environment to get the data like image, sound etc. out of it.
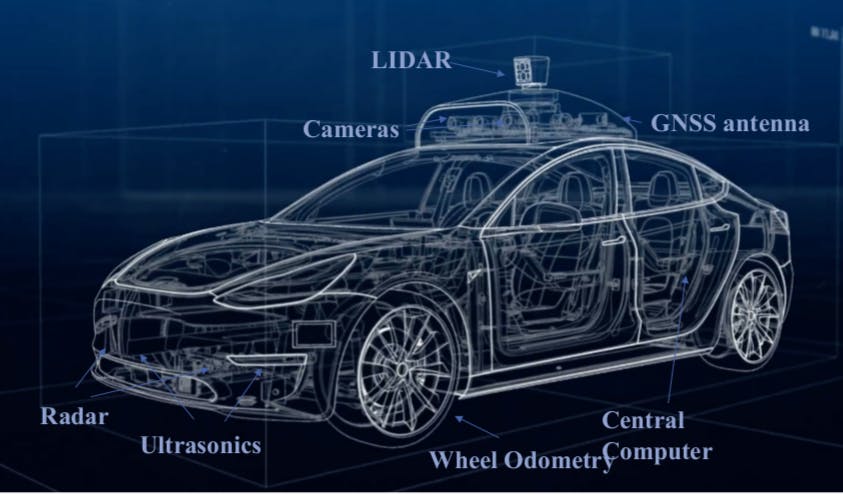
Sensors
Light detection and ranging sensor (LiDER): It is used to get a 3D sense(360 degree) of the nearby environment. LiDER sends some laser pulses every second and reflected back to the receiver which then create a 3D point cloud. The 3D representation is updated every second creating an animation of the environment. This helps the vehicle to gain information like obstacle presence etc.
Stereo(camera): Cameras are used to capture a 2D pictures which enables depth estimation from image data.
Radio Detection And Ranging(RADAR): It is installed for robust detection and relative speed estimation. Assuming you know how they work, radios waves and all.
Ultrasonic: Again assuming you know how they work. It is used to get accurate distance in short range. They work in any weather condition.
Global Navigation Satellite System (GNSS): This is Global Positioning System(GPS is subset of GNSS). It is use to get position of vehicles which are apart from each other and other operations like when there is no markings in road.
Inertial Measuring Unit (IMU): This unit consists of gyroscope and accelerometers which determines the LInear-Angular rotation rate, Linear-Angular Acceleration, Heading etc.
Video cameras and Wheel odometry will be discussed in later articles.
That's all for this article. We will learn about Environment representations and analysis, Hardware and different software architectures next week. Your questions are always welcomed.